2021年度中間発表について
12/14,16,21,23日に2021年度の中間発表を行いました。今年も山本研究室と合同で行いました。

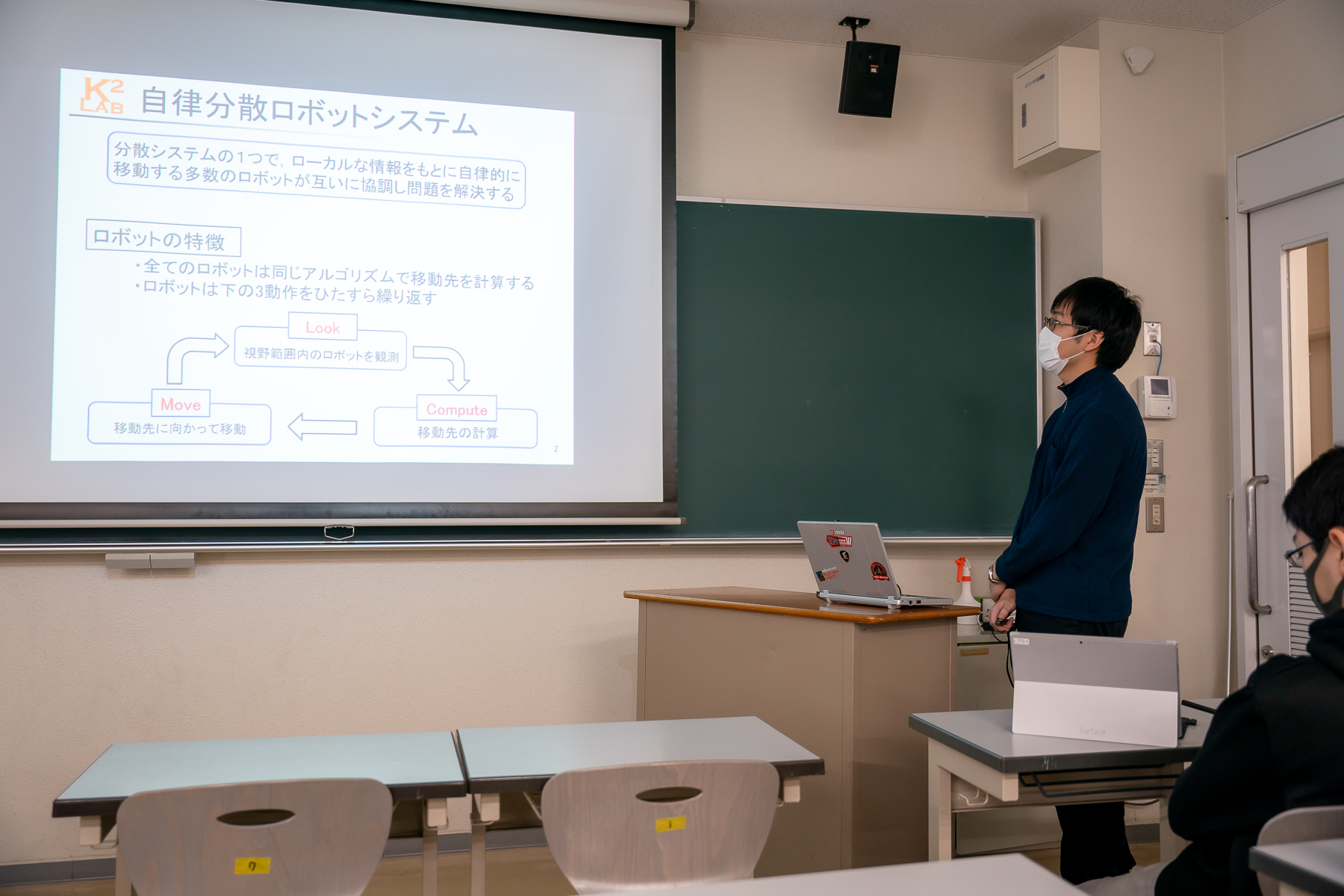
M2石田湧之さん 「離散格子平面における2色のライト付き自律分散ロボット群の完全相互観測アルゴリズムに関する研究」
M2渡辺智之さん「Turtlebot3による離散空間上での座標系生成と位置誤差修正に関する研究」
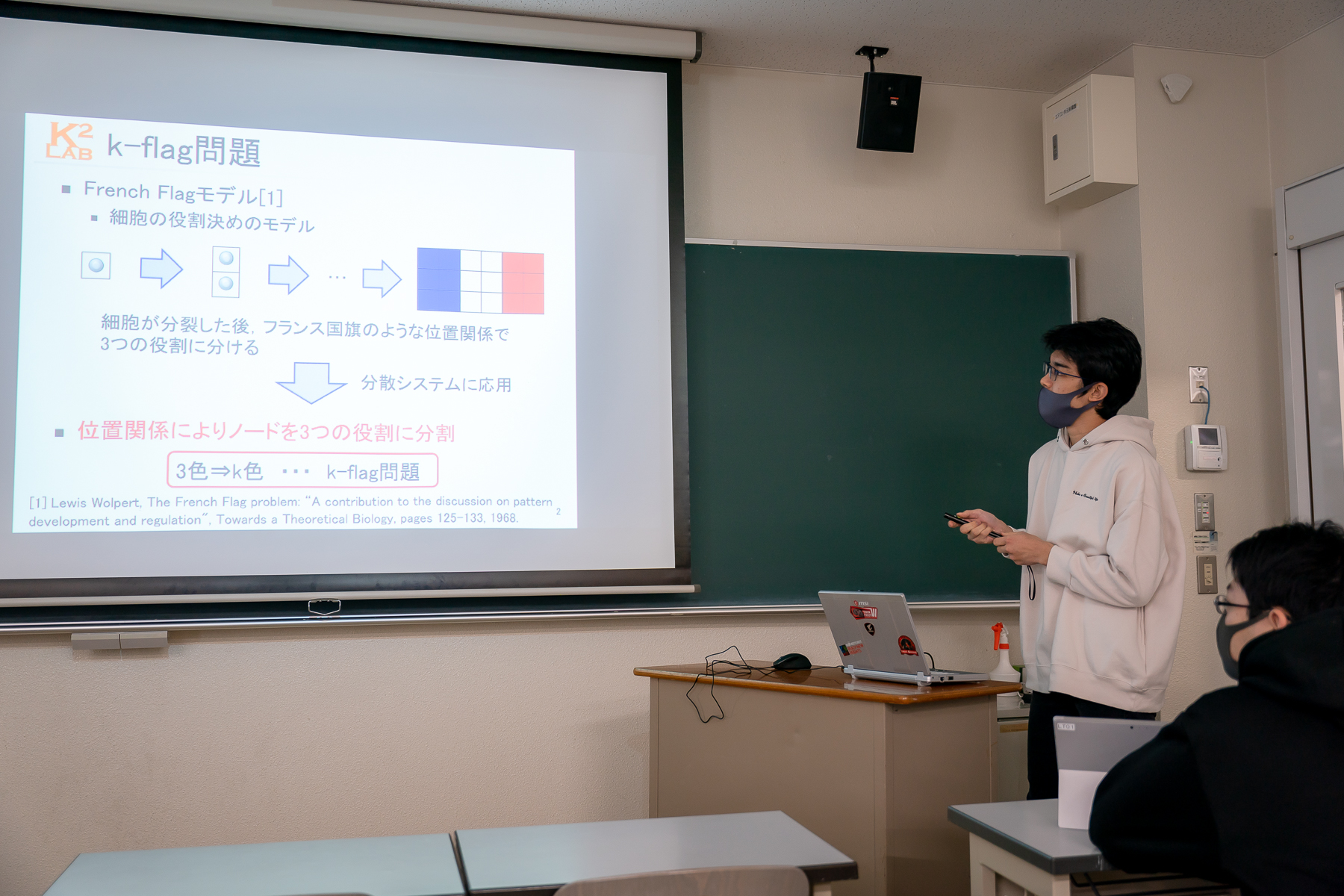
M2横山雄大さん「停止故障を考慮したk-flag問題のための自己安定アルゴリズムに関する研究」

M2成瀬隆昌さん「Hybrid networkモデルにおける高速な木分解構成アルゴリズム」

M2森本椋太さん「Congestモデルにおける最小カットを高確率で発見する乱択分散アルゴリズム」
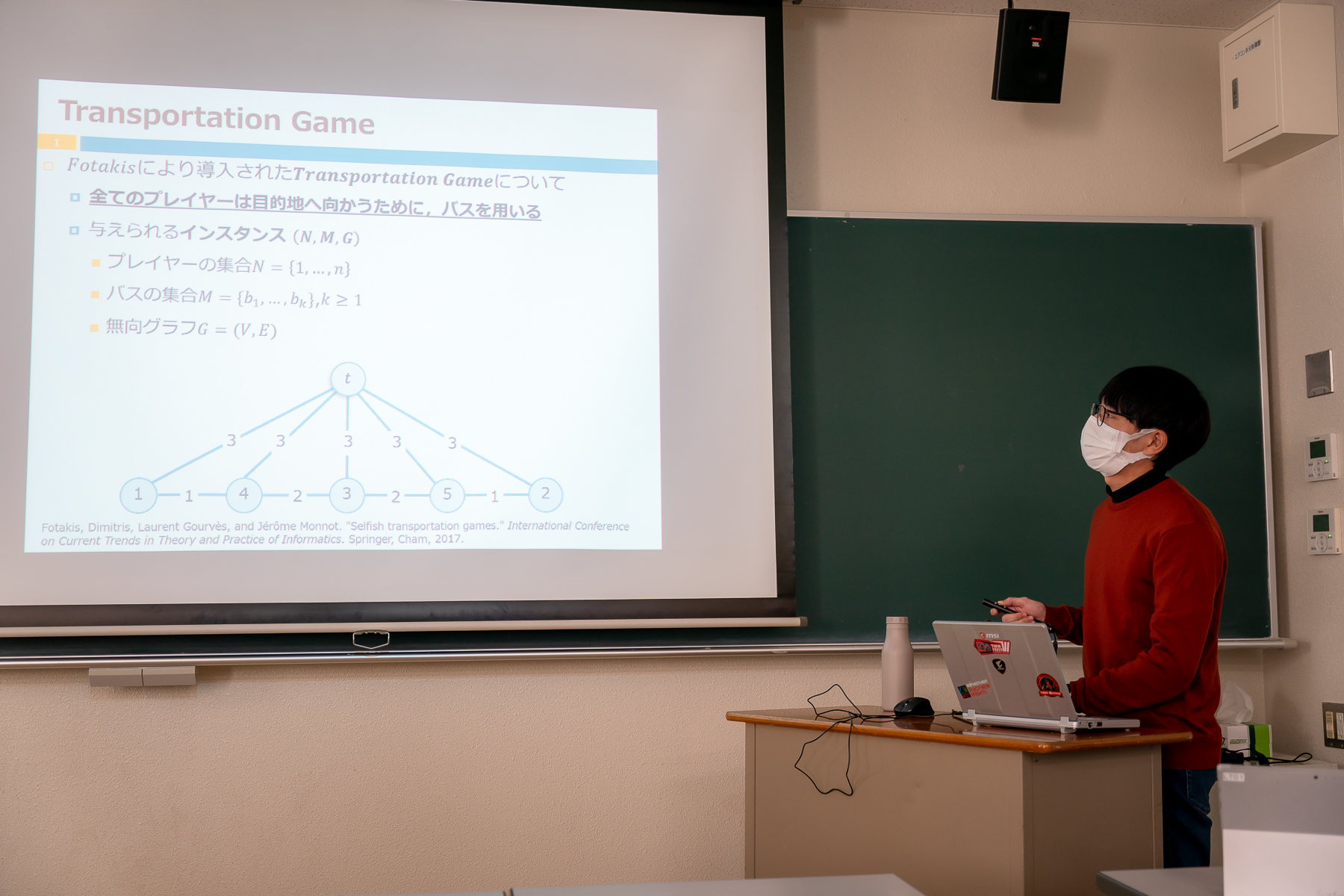
M2山下侑真さん「同一巡回列にしたがうデマンドバスによる最適輸送アルゴリズム」

M2細川秀樹さん「最大次数3のグラフにおける辞書式深さ優先探索から極大辞書式最小パスへのサイズ保存対数領域帰着」
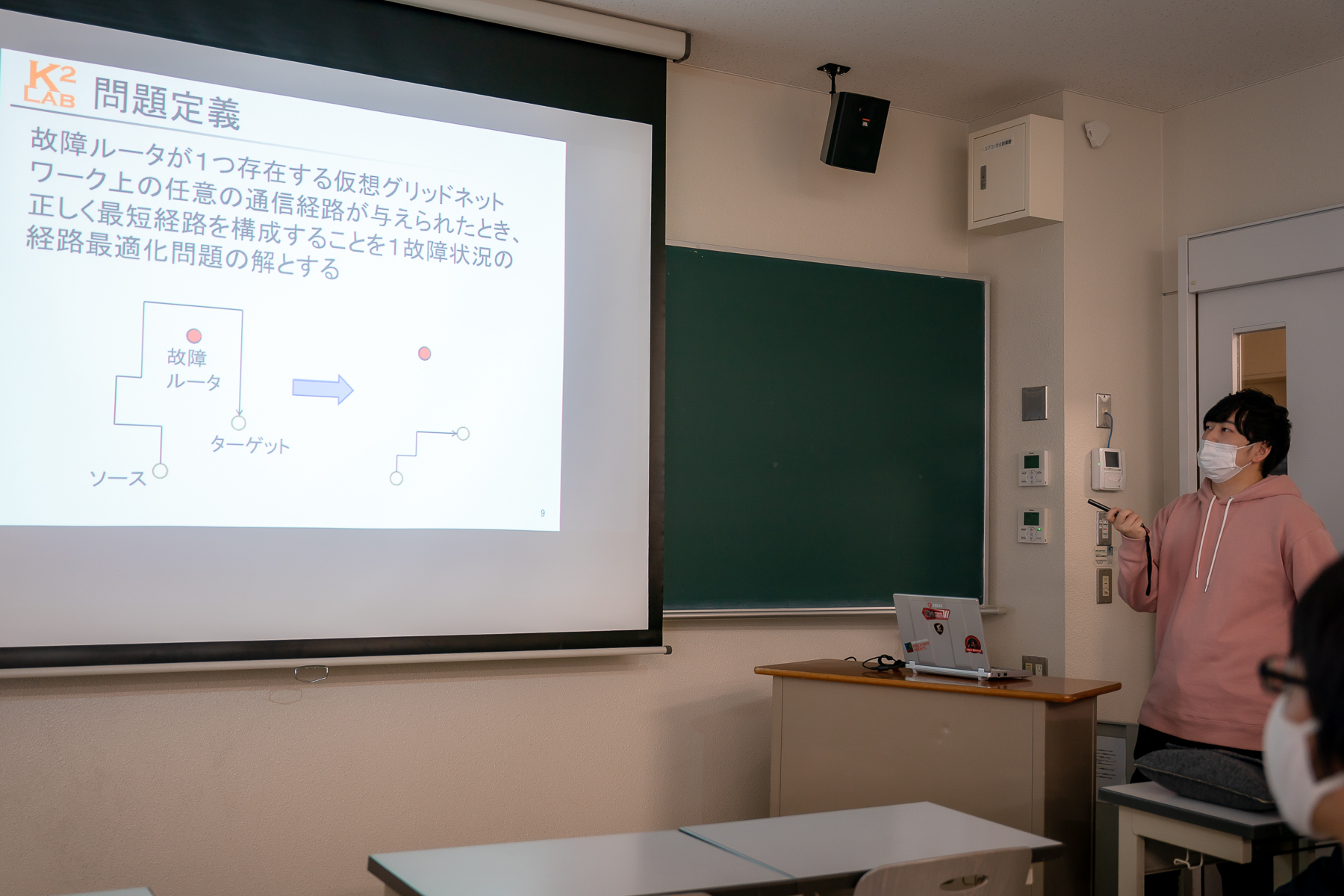
B4小柳祐輔さん「仮想グリッドネットワークにおける1故障状況の経路最適化分散アルゴリズムに関する研究」
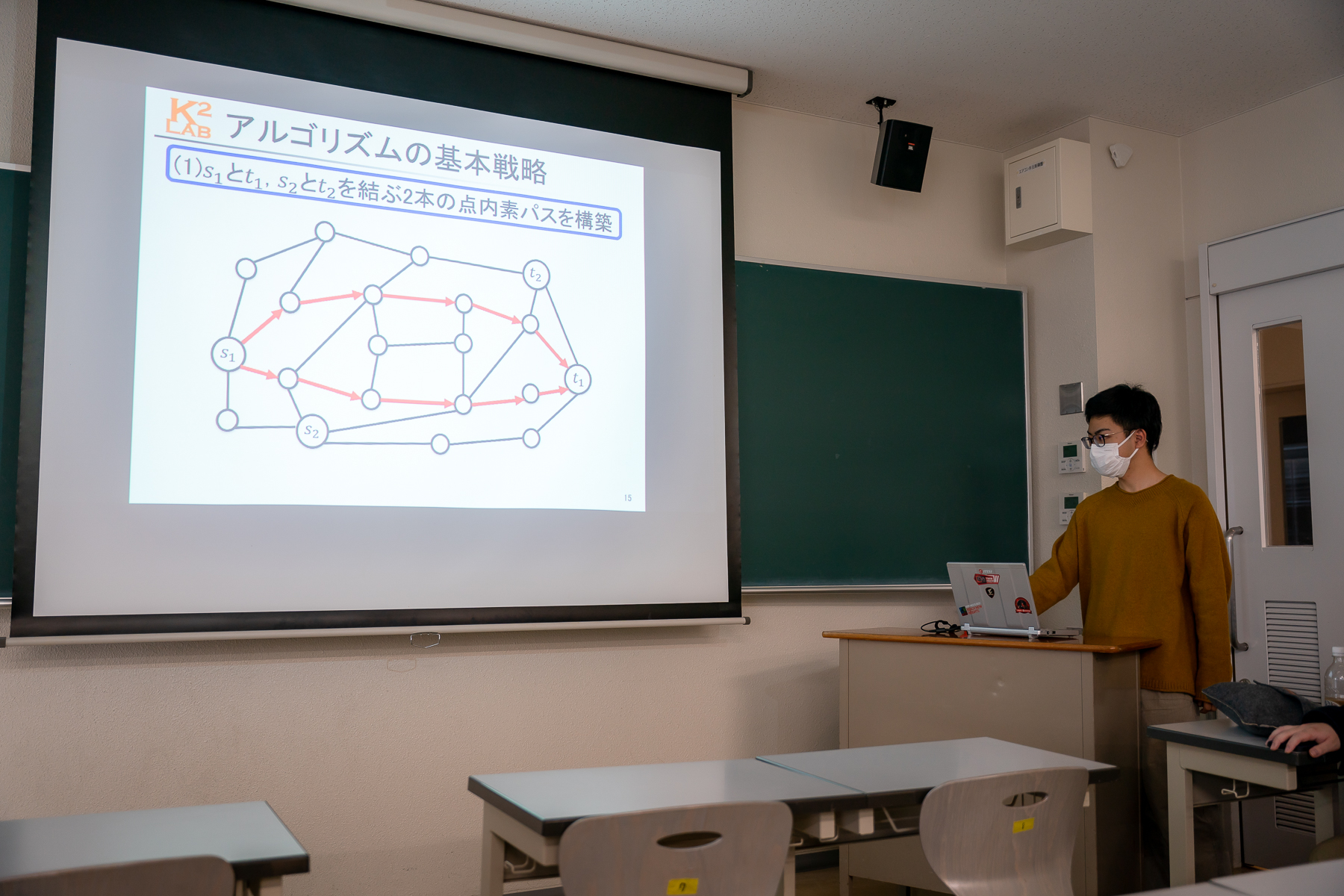
B4北岡拓馬さん「2-連結グラフ上の2頂点対点素パスを構築する自己安定アルゴリズムに関する研究」

B4相津俊介さん「自律分散ロボットで間隔dの均一配置を視野d-1で実現するアルゴリズムに関する研究」
B4笠原朋哉さん「ペアボットモデルによる洞窟あり物体充填被覆アルゴリズムに関する研究」
B4加藤奏さん「方向感覚を持たない3組のペアボットで一定の方向に直進させ続けるアルゴリズムに関する研究」
B4辻雄貴さん「格子平面で相互観測可能な均一半円形成を実現する自律分散ロボットアルゴリズムに関する研究」